%201-1.webp?width=148&height=74&name=our%20work%20(2)%201-1.webp)



.png?width=344&height=101&name=Mask%20group%20(5).png)

Reinforcement learning has gained significant popularity in the field of robotics due to its ability to develop intelligent and autonomous systems. One of the most crucial applications of reinforcement learning in robotics is the development of an autonomous navigation system.
In this article, we will explore the key concepts and steps involved in building such a system, leveraging advanced RPA solutions for seamless integration and enhanced functionality.
Introduction to Reinforcement Learning
Reinforcement learning is a type of machine learning where an agent learns to make decisions by interacting with an environment. The agent takes actions based on its current state and receives feedback in the form of rewards or penalties.

Over time, the agent learns to maximize the cumulative reward by discovering the optimal actions to take in different states.
Components of an Autonomous Navigation System
To build an autonomous navigation system, we need to consider various components that work together seamlessly.
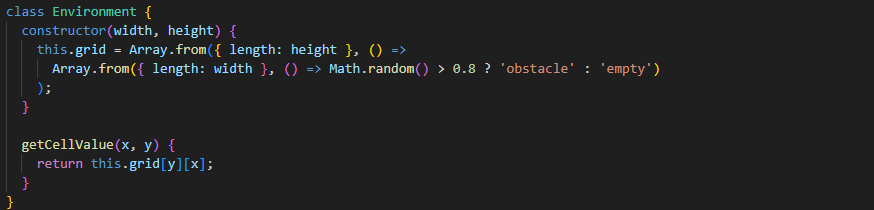
1. Environment Modeling
The first step involves modeling the environment in which the robot will navigate. This can be achieved by using sensors such as cameras, LIDAR, or depth sensors to perceive the surroundings. The collected data is then processed to build a representation of the environment, which could be in the form of a map or a grid.
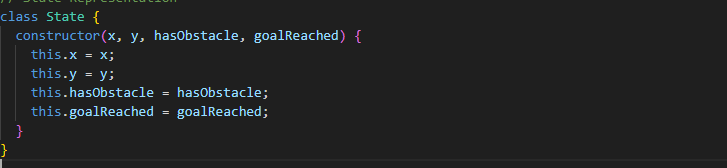
2. State Representation
Once we have a model of the environment, we need to define a state representation for the reinforcement learning agent. This representation should capture the pertinent information required for decision-making. For example, in the case of a mobile robot, the state representation might include the current position, obstacles in the vicinity, and the goal location.
3. Action Space
The next step is to define the possible actions that the agent can take. For navigation systems, this typically involves specifying the robot's motion commands, such as forward, backward, turn left, turn right, etc. The action space can also be continuous, allowing for smoother and more fine-grained control.
4. Reward Design
Designing an appropriate reward function is crucial for effective learning. The reward function provides feedback to the agent, guiding it towards optimal behavior. In the case of navigation, the reward function might provide positive rewards for reaching the goal, negative rewards for collisions or deviating from the desired path, and smaller intermediate rewards for making progress toward the goal.

5. Learning Algorithm
Several reinforcement learning algorithms can be used to train the agent, such as Q-learning, SARSA, or deep reinforcement learning algorithms like DQN or PPO. The choice of algorithm depends on the specifics of the problem and the available resources.
6. Training and Evaluation
Once the components are in place, the agent can be trained in a simulated or real-world environment. Simulated training allows for faster iteration and experimentation, while real-world training provides an opportunity to fine-tune the system. The performance of the trained agent can be evaluated by measuring metrics such as success rate, path time, or collision rate.
Conclusion
In conclusion, this article has illuminated the formidable potential of reinforcement learning in revolutionizing autonomous navigation systems within the realm of robotics.
Through meticulous processes encompassing environment modeling, adept state representation, judicious reward design, and the application of diverse learning algorithms, we stand poised to empower robots with the capability to navigate intricate terrains autonomously. The provided Node.js code snippets serve as practical demonstrations of these pivotal concepts.
By harnessing the prowess of reinforcement learning, we equip ourselves to surmount challenges presented by dynamic environments, uncertainties, and the vastness of state-action spaces.
As the synergy between robotics and reinforcement learning continues to evolve, we anticipate unprecedented strides in autonomous navigation, endowing robots with heightened autonomy and intelligence to surmount diverse and demanding environments.





-1.png?width=352&name=AI%20in%20Navigation%20%20(1)-1.png)